SMART-Lab
Smart Materials for Advanced Robotic Technologies



About SMART Lab
In SMART-Lab, we are primarily focused on the development of novel soft, and programmable materials. We aim to employ these materials in the design, and fabrication of emerging generations of mobile soft robots, functional devices, and artificial biological organisms.
With a multidisciplinary approach, we utilize our knowledge of molecular engineering, chemistry, materials science, and micro/nanotechnology to create smart materials with
programmed properties and responses to external cues such as heat, light, electrical, and magnetic fields.
We envision this class of materials can augment locomotion, and manipulation capabilities of existing medical robotic systems. In addition, they can be great candidates for the development of the new generation of medical micro-robots, soft miniature bio-devices, and artificial living organisms.
Recent Publications

Herrera Restrepo, RS., Tejedor García, IH., Scarfo, MG., Bouzari, N., Rajabi, N., Bantysh, O., Torres‐Andrés, J., James, CWV., Guix, M., Aghakhani,A., Ignés‐Mullol, J., Pané, S., Puigmartí‐Luis, J., Shahsavan, H., (2026) Porous Hybrid Soft Actuators From Liquid Crystal Networks and Lyotropic Chromonic Liquid Crystal Templated Hydrogels. Advanced Materials: e16677

Shape-change programming of zwitterionic hydrogels via chemical gradients directed by surface energy
Bouzari, N., Alib, M., Hong, E., Suthaharan, N., Bouzanne, M., Aghakhanic, A., Shahsavan, H., (2026) Shape-change programming of zwitterionic hydrogels via chemical gradients directed by surface energy. J. Mater. Chem. A

Stiffening Liquid Crystal Elastomers with Liquid Crystal Inclusions
Vasanji, S., Scarfo, M.G., Alyami, A., Mekonnen, T.H., Hajireza, P., Saed, M.O., Jákli, A., Shahsavan, H., (2025) Stiffening Liquid Crystal Elastomers with Liquid Crystal Inclusions. Adv. Mater., 37, no. 45: 2504592.
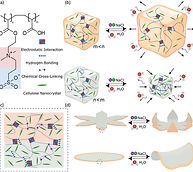
Bouzari, N., Nasseri, R., Huang, J., Ganguly, S., Tang, X., Mekonnen, T.H., Aghakhani, A. and Shahsavan, H., (2025), Hybrid Zwitterionic Hydrogels with Encoded Differential Swelling and Programmed Deformation for Small‐Scale Robotics. Small Methods, 9(3), p.2400812.